We’re often told it is “unscientific” or “meaningless” to ask what happened before the Big Bang. But a new paper by FQxI cosmologist Eugene Lim, of King’s College London, UK, and astrophysicists Katy Clough, of Queen Mary University of London, UK, and Josu Aurrekoetxea, at Oxford University, UK, published in Living Reviews in Relativity, proposes a way forward: using complex computer simulations to numerically (rather than exactly) solve Einstein’s equations for gravity in extreme situations.
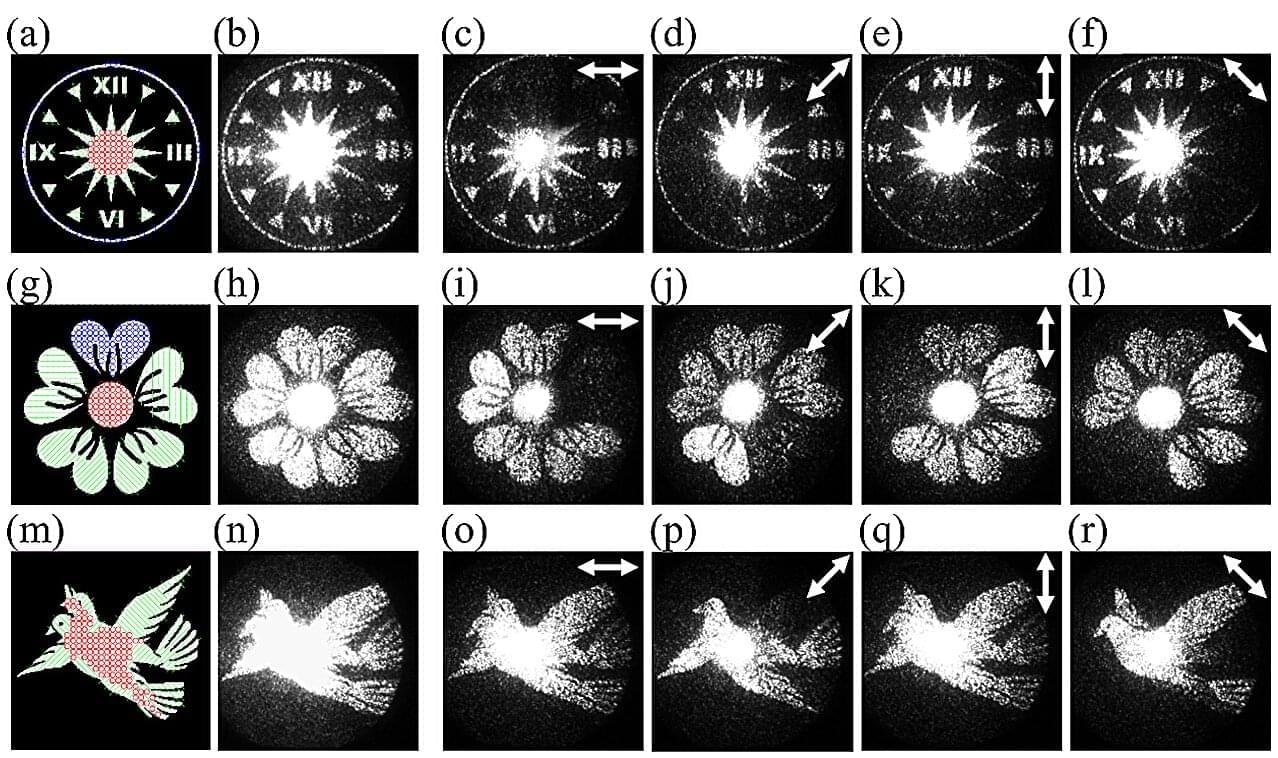
Holography—the science of recording and reconstructing light fields—has long been central to imaging, data storage, and encryption. Traditional holographic systems, however, rely on bulky optical setups and interference experiments, making them impractical for compact or integrated devices. Computational methods such as the Gerchberg–Saxton (GS) algorithm have simplified hologram design by eliminating the need for physical interference patterns, but these approaches typically produce scalar holograms with uniform polarization, limiting the amount of information that can be encoded.
Having lived with an ALS diagnosis since 2018, Kate Nycz can tell you firsthand what it’s like to slowly lose motor function for basic tasks. “My arm can get to maybe 90 degrees, but then it fatigues and falls,” the 39-year-old said. “To eat or do a repetitive motion with my right hand, which was my dominant hand, is difficult. I’ve mainly become left-handed.”
People like Nycz who live with a neurodegenerative disease like ALS or who have had a stroke often suffer from impaired movement of the shoulder, arm or hands, preventing them from daily tasks like tooth-brushing, hair-combing or eating.
For the last several years, Harvard bioengineers have been developing a soft, wearable robot that not only provides movement assistance for such individuals but could even augment therapies to help them regain mobility.
But no two people move exactly the same way. Physical motions are highly individualized, especially for the mobility-impaired, making it difficult to design a device that works for many different people.
It turns out advances in machine learning can create a more personal touch. Researchers in the John A. Paulson School of Engineering and Applied Sciences (SEAS), together with physician-scientists at Massachusetts General Hospital and Harvard Medical School, have upgraded their wearable robot to be responsive to an individual user’s exact movements, endowing the device with more personalized assistance that could give users better, more controlled support for daily tasks.
Patients arriving at appointments with researched information is not new, but artificial intelligence (AI) tools such as ChatGPT are changing the dynamics.
Their confident presentation can leave physicians feeling that their expertise is challenged. Kumara Raja Sundar, MD, a family medicine physician at Kaiser Permanente Burien Medical Center in Burien, Washington, highlighted this trend in a recent article published in JAMA.
A patient visited Sundar’s clinic reporting dizziness and described her symptoms with unusual precision: “It’s not vertigo, but more like a presyncope feeling.” She then suggested that the tilt table test might be useful for diagnosis.
Occasionally, patient questions reveal subtle familiarity with medical jargon. This may indicate that they either have relevant training or have studied the subject extensively.
(Artificial Intelligence is the science of making machines do things that would require intelligence if done by men — Marvin Minsky. Google helps you gain information with a search engine. AI helps you gain information through algorithms. It is the same thing. However people profit from ignorance).
Patients are showing up with ChatGPT-generated diagnoses, challenging physicians to balance empathy, evidence, and authority in the exam room.
Researchers at the Johns Hopkins Applied Physics Laboratory (APL) in Laurel, Maryland, have demonstrated that a quantum algorithm can be used to speed up an information analysis task that classical computers struggle to perform.
The innovation tackles a key element of information operations: tracking and attributing topics and narratives as they emerge and evolve online, which can help analysts spot indications of potential terrorist acts, for example. This involves using computers to perform what’s known as semantic text similarity analysis, or comparing the similarities within a textual dataset — not just the similarity of the words, but the meaning behind them, which makes it possible to identify related texts even if they don’t share any common keywords.
“The amount of open-source text data online — on social media platforms especially — is growing dramatically, and our ability to analyze all of that data has not kept pace with our ability to collect it,” said Roxy Holden, a mathematician at APL and principal investigator of this effort. “Intelligence analysts have limited resources, so finding better ways to automate this kind of analysis is critical for the military and the intelligence community.”
APL researchers have demonstrated that a quantum algorithm can be used to speed up an information analysis task that classical computers struggle to perform.
Large language models (LLMs) excel at using textual reasoning to understand the context of a document and provide a logical answer about its contents. But these same LLMs often struggle to correctly answer even the simplest math problems.
Textual reasoning is usually a less-than-ideal way to deliberate over computational or algorithmic tasks. While some LLMs can generate code like Python to handle symbolic queries, the models don’t always know when to use code, or what kind of code would work best.
LLMs, it seems, may need a coach to steer them toward the best technique.
Enter CodeSteer, a smart assistant developed by MIT researchers that guides an LLM to switch between code and text generation until it correctly answers a query. (Strangely like a text editor “CodeSteer”🤔)
CodeSteer is a smart assistant from MIT that automatically guides large language models to switch between generating text and code, and to refine its response, until it answers a query correctly.
Researchers at the Universitat Autònoma de Barcelona (UAB) have successfully created a new form of magnetic state known as a magneto-ionic vortex, or “vortion.” Their findings, published in Nature Communications, demonstrate an unprecedented ability to control magnetic properties at the nanoscale under normal room temperature conditions. This achievement could pave the way for next-generation magnetic technologies.
As the growth of Big Data continues, the energy needs of information technologies have risen sharply. In most systems, data is stored using electric currents, but this process generates excess heat and wastes energy. A more efficient approach is to control magnetic memory through voltage rather than current. Magneto-ionic materials make this possible by enabling their magnetic properties to be adjusted when ions are inserted or removed through voltage polarity changes. Up to now, research in this field has mainly focused on continuous films, instead of addressing the nanoscale “bits” that are vital for dense data storage.
At very small scales, unique magnetic behaviors can appear that are not seen in larger systems. One example is the magnetic vortex, a tiny whirlpool-like magnetic pattern. These structures play an important role in modern magnetic data recording and also have biomedical applications. However, once a vortex state is established in a material, it is usually very difficult to modify or requires significant amounts of energy to do so.
High-purity multi-photon states are essential for photonic quantum computing. Among existing platforms, semiconductor quantum dots offer a promising route to scalable and deterministic multi-photon state generation. However, to fully realize their potential we require a suitable optical excitation method. Current approaches of multi-photon generation rely on active polarization-switching elements (e.g., electro-optic modulators, EOMs) to spatio-temporally demultiplex single photons. Yet, the achievable multi-photon rate is fundamentally limited by the switching speed of the EOM. Here, we introduce a fully passive demultiplexing technique that leverages a stimulated two-photon excitation process to achieve switching rates that are only limited by the quantum dot lifetime. We demonstrate this method by generating two-photon states from a single quantum dot without requiring any active switching elements. Our approach significantly reduces the cost of demultiplexing while shifting it to the excitation stage, enabling loss-free demultiplexing and effectively doubling the achievable multi-photon generation rate when combined with existing active demultiplexing techniques.
I Introduction.
Photonic quantum computing offers a unique advantage over other quantum platforms due to the long coherence time of photons, enabling robust quantum communication, quantum information processing, and quantum simulations. A critical requirement for these applications is the reliable generation of high-purity multi-photon states, i.e., nn indistinguishable photons in nn spatial modes – which serve as fundamental building blocks for quantum algorithms, error correction, quantum simulations, and advanced photonic networks. Multi-photon states are also essential for probing quantum optical phenomena such as multi-photon interference. The most widely used sources to produce multi-photon quantum states are the ones relying on parametric down-conversion or four wave mixing in nonlinear crystals. However, the scalability here is limited, due to the probabilistic nature of photon emission and the required resource overhead for computing and boson sampling applications.
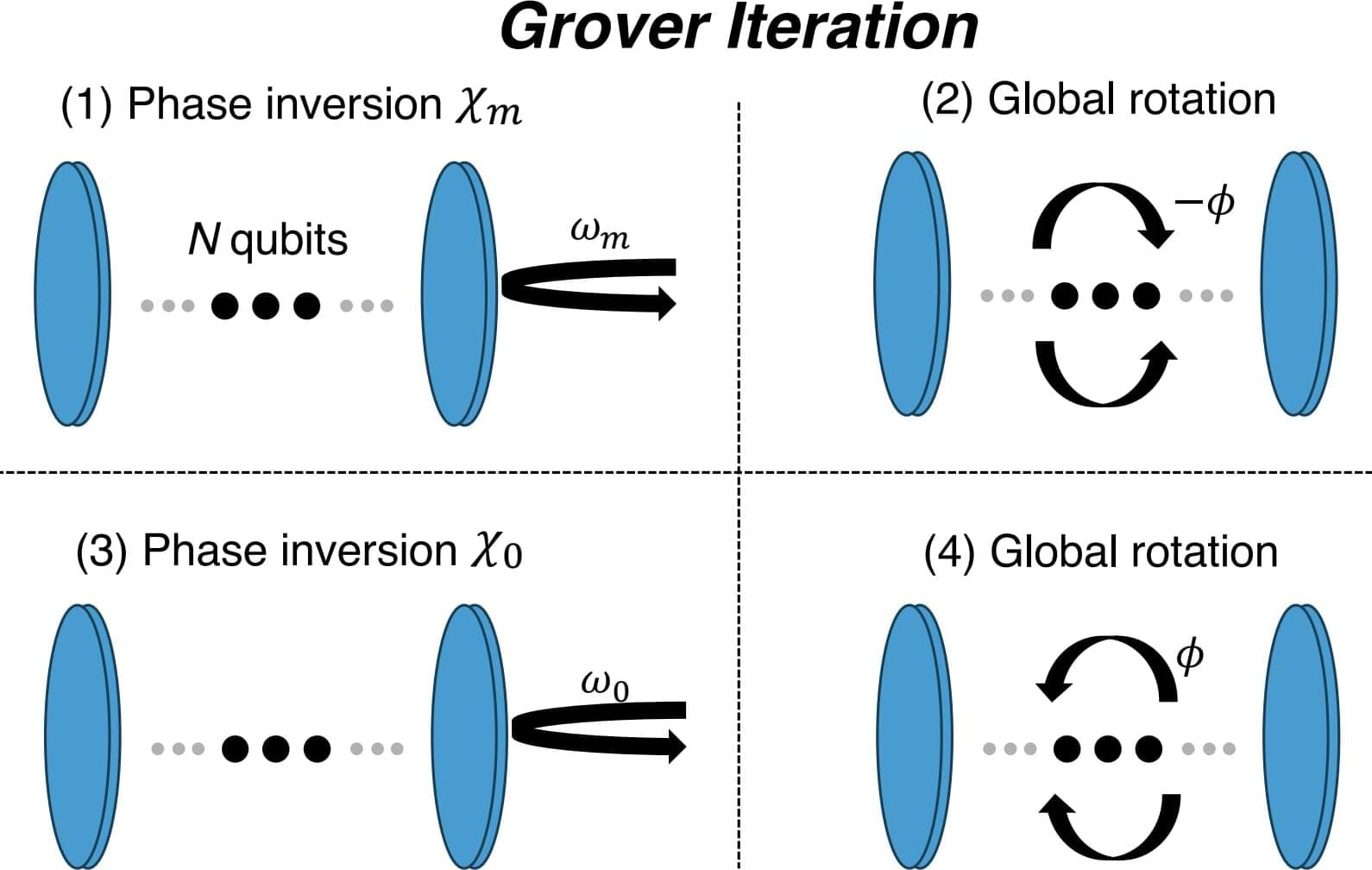
The reliable engineering of quantum states, particularly those involving several particles, is central to the development of various quantum technologies, including quantum computers, sensors and communication systems. These collective quantum states include so-called Dicke and Greenberger-Horne-Zeilinger (GHZ) states, multipartite entangled states that can be leveraged to collect precise measurements, to correct errors made by quantum computers and to enable communication between remote devices leveraging quantum mechanical effects.
We analyse five potential trajectories for the development of quantum computing, based on current technical achievements and fundamental challenges. We draw from recent experimental results including Google’s Willow processor achieving below-threshold error correction. We also consider IBM’s quantum roadmap and emerging classical algorithms that challenge quantum supremacy. Additionally, our evaluation includes the bifurcation between NISQ and fault-tolerant approaches.




{kind=link}