Feb 12, 2022
Materials challenges and opportunities for quantum computing hardware
Posted by Shubham Ghosh Roy in categories: computing, information science, particle physics, quantum physics
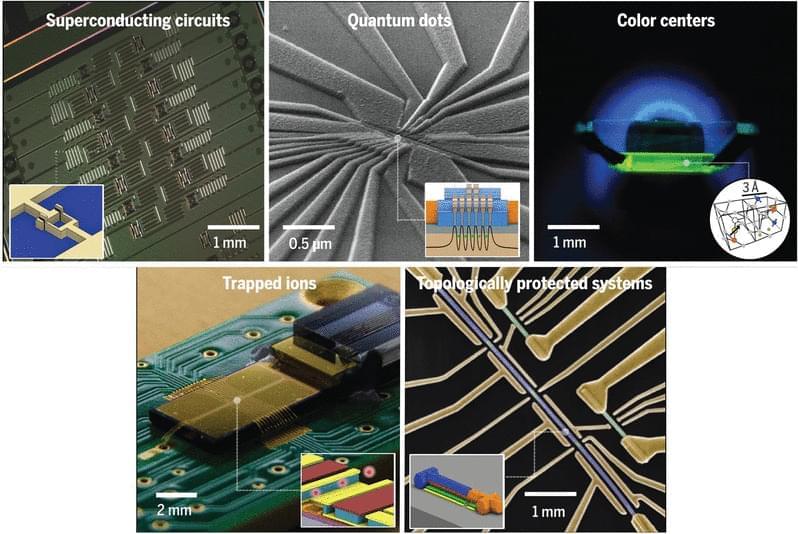
The potential of quantum computers to solve problems that are intractable for classical computers has driven advances in hardware fabrication. In practice, the main challenge in realizing quantum computers is that general, many-particle quantum states are highly sensitive to noise, which inevitably causes errors in quantum algorithms. Some noise sources are inherent to the current materials platforms. de Leon et al. review some of the materials challenges for five platforms for quantum computers and propose directions for their solution.
Science, this issue p. eabb2823.