Astroport Space Technologies is developing construction tools for use with Venturi Astrolab’s self-driving rovers to build base Trump wants established by 2030.
Get the latest international news and world events from around the world.

Study maps gene activity linked to neurotransmission in living brains
{kind=link}
Researchers have identified a distinct and reproducible gene expression program associated with neurotransmission in the living human brain, offering unprecedented insight into the molecular mechanisms that support human cognition, emotion, and behavior. The findings were published February 19 in Molecular Psychiatry.
Neurotransmission-the electrical and chemical signaling between neurons-is fundamental to all brain function. Until now, most gene expression studies of the human brain have relied on postmortem tissue, limiting scientists’ ability to understand which genes are actively involved in real-time neuronal communication.
In this study, investigators integrated gene expression profiling from the prefrontal cortex with direct intracranial measures of neurotransmission collected from the brains of more than 100 individuals as they underwent neurosurgical procedures. By combining molecular data with real-time physiological recordings, the team identified a coordinated set of genes whose activity tracks with neuronal signaling-a transcriptional program associated with neurotransmission.

Microwave quantum network shows resilience against heat-related disturbances
Quantum communication systems are emerging solutions to transmit information between devices in a network leveraging quantum mechanical phenomena, such as entanglement. Entanglement is a quantum effect that entails a link between two or more particles that share a unified state even at a distance, so that measuring one instantly affects the other.
Like most quantum systems, quantum communication networks are typically highly sensitive to changes and disturbances in the environment, also referred to as noise. Random changes in temperature, as well as random energy caused by heat (i.e., thermal noise), can disrupt the connections in a quantum network, making the reliable transfer of quantum states challenging.
Researchers in Shenzhen, China have demonstrated a quantum network that relies on microwave photons, low-energy light particles and a superconducting transmission line. Their paper, published in Nature Electronics, introduces a promising approach to reduce thermal noise in this network, enabling the reliable transmission of quantum states between distant devices.
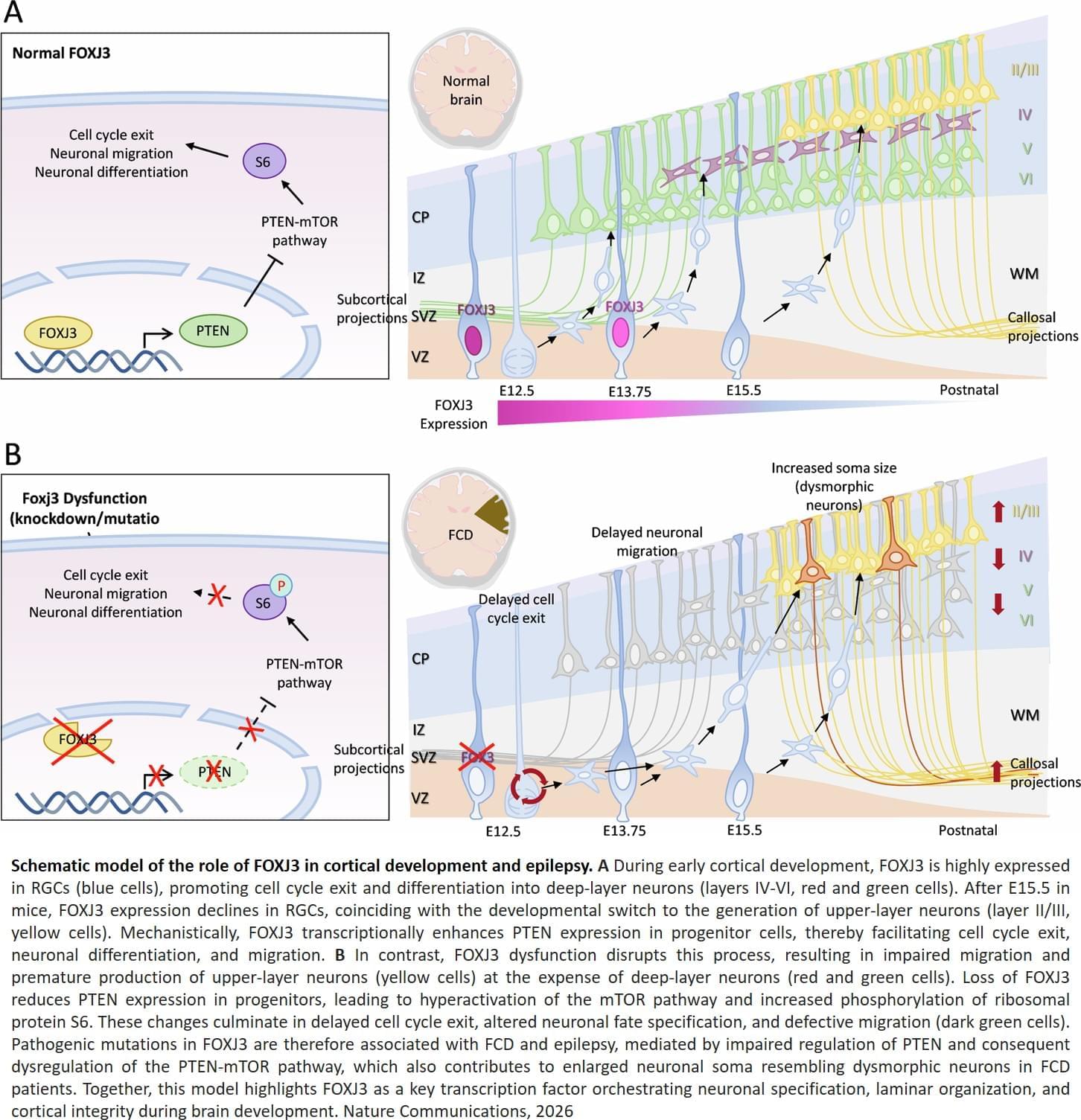
FOXJ3 gene variants linked to drug-resistant focal epilepsy
Researchers have discovered that mutations in the FOXJ3 gene act as a “master switch” failure, disrupting how the brain builds its layers and leading to FCD, a primary cause of drug-resistant epilepsy. The study reveals how FOXJ3 controls the formation of brain cortical layers during brain development by regulating the PTEN–mTOR signaling pathway.
The PTEN-mTOR signaling pathway acts as a critical control system for cell growth, proliferation, metabolism, and survival. When this system malfunctions, it causes many neurological disorders including FCD, tuberous sclerosis complex and neurofibromatosis. The discovery of FOXJ3, a transcription factor (a protein that regulates gene activity), as a new cause of these “mTOR pathway diseases” (mTORpathies) provides new insight into the biological origins of epilepsy and cortical malformations, as well as potential new treatments.
The research team by studying families with inherited focal epilepsy alongside mouse and single-cell analysis, uncovered how FOXJ3 mutations disrupt how brain cells move to their correct locations and take on their proper roles during early brain development.
“Focal cortical dysplasia is one of the most common causes of epilepsy that does not respond to medication, yet in many patients the underlying cause remains unknown,” said the corresponding author. “Our findings identify FOXJ3 as the critical genetic and molecular link between abnormal brain development and epilepsy.” ScienceMission sciencenewshighlights.

A Review of How the Heart Ages
The European Heart Journal has published a review of what happens to the human heart as it ages, noting the cellular effects of mitochondrial dysfunction and cellular senescence along with more visible changes such as hypertrophy and fibrosis.
A constantly working organ
The reviewers begin this paper by noting the constant work of the heart, as it must unceasingly pump blood for us to be able to live. Unfortunately, this organ is well-known to fail with age; while only roughly 1% of people under 55 suffer heart failure, it occurs in over 10% of people over 70 [1].
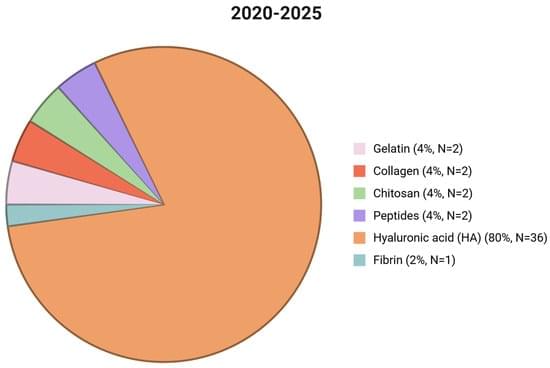
Dendritic cell immunotherapy induces anti-tumor effect in a transgenic mouse model of pancreatic ductal adenocarcinoma
{kind=link}
The promise of dendritic cell (DC)-based immunotherapy has been established by two decades of translational research. However, long-term benefits of DC vaccination are reported in only scattered patients with pancreatic ductal adenocarcinoma (PDAC). Here we optimize DC vaccination and evaluate its safety and antitumor efficacy in the genetically engineered PDAC model (KrasLSL-G12D p53LSL-R172H Pdx-1-Cre (KPC mice)). KPC transgenic mice and orthotopic models using KPC cell lines were treated with DC vaccine via an intraperitoneal route. Tumor growth and microenvironment were dynamically monitored by magnetic resonance imaging (MRI). Histological analysis and flow cytometry were used to evaluate tumor-directed T cell immunity of these mice. DC vaccine via intraperitoneal injection suppressed tumor progression (P = 0.030) and significantly prolonged survival time (P = 0.028) in KPC mice. Vaccinated KPC mice displayed an increased antitumor T cell response indicated by a higher IFN-γ production (P = 0.016) and tumor-specific cytotoxicity (P = 0.027). Particularly, the mean apparent diffusion coefficient (ADC) values of KPC tumor calculated from diffusion weighted MRI (DW-MRI) were significantly higher in DC vaccine group than that in control group (P < 0.001). More interestingly, we observed that ADC positively correlated with fibrosis in KPC tumor (R2 = 0.463, P = 0.015). Our study demonstrated that the immunization with our improved DC vaccine can elicit a strong tumor-specific immune response and tumor suppression in PDAC.
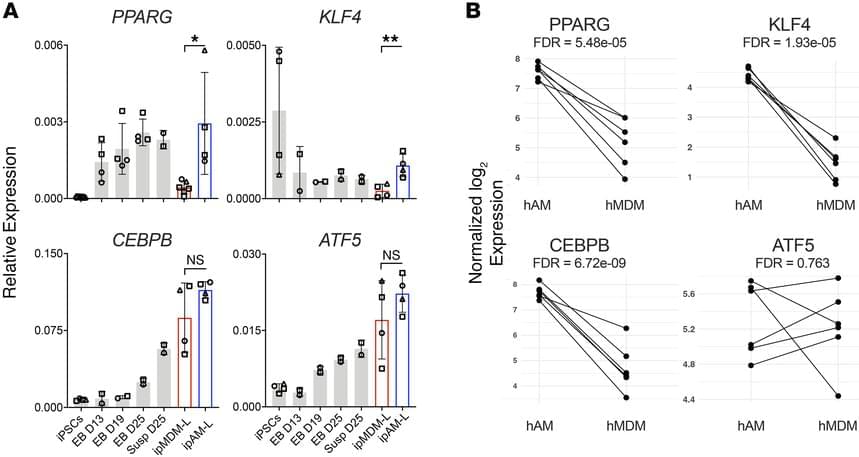
A new model for alveolar macrophage-Mycobacterium tuberculosis (TB) interactions!
A new model for alveolar macrophage–Mycobacterium tuberculosis (TB) interactions!
https://doi.org/10.1172/jci.insight.
Michael S. Glickman & team establish a stem cell–derived lung alveolar macrophage model to reveal itaconate functions differently between human macrophage types in the host defense against Mtb:
The figure: Brightfield and stained images of two macrophage populations.
1Immunology Program, Sloan Kettering Institute, Memorial Sloan Kettering Cancer Center, New York, New York, USA.
2Immunology and Microbial Pathogenesis Program, Weill Cornell Medicine, New York, New York, USA.