Fourier Intelligence-Robotics/YouTube.
Set in Salem, Oregon, “RoboFab”, Agility Robotics’ 70,000-square-foot robot factory is slated to open later this year and manufacture the company’s bipedal robot Digit.
Fourier Intelligence-Robotics/YouTube.
Set in Salem, Oregon, “RoboFab”, Agility Robotics’ 70,000-square-foot robot factory is slated to open later this year and manufacture the company’s bipedal robot Digit.

MENLO PARK, California, Sept 28 (Reuters) — Meta Platforms (META.O) used public Facebook and Instagram posts to train parts of its new Meta AI virtual assistant, but excluded private posts shared only with family and friends in an effort to respect consumers’ privacy, the company’s top policy executive told Reuters in an interview.
Meta also did not use private chats on its messaging services as training data for the model and took steps to filter private details from public datasets used for training, said Meta President of Global Affairs Nick Clegg, speaking on the sidelines of the company’s annual Connect conference this week.
“We’ve tried to exclude datasets that have a heavy preponderance of personal information,” Clegg said, adding that the “vast majority” of the data used by Meta for training was publicly available.
This video covers digital immortality, its required technologies, processes of uploading a mind, its potential impact on society, and more. Watch this next video about the world in 2200: https://bit.ly/3htaWEr.
🎁 5 Free ChatGPT Prompts To Become a Superhuman: https://bit.ly/3Oka9FM
🤖 AI for Business Leaders (Udacity Program): https://bit.ly/3Qjxkmu.
☕ My Patreon: https://www.patreon.com/futurebusinesstech.
➡️ Official Discord Server: https://discord.gg/R8cYEWpCzK
CHAPTERS
00:00 Required Technologies.
01:42 The Processes of Uploading a Mind.
03:32 Positive Impacts On Society.
05:34 When Will It Become Possible?
05:53 Is Digital Immortality Potentially Dangerous?
SOURCES:
• The Singularity Is Near: When Humans Transcend Biology (Ray Kurzweil): https://amzn.to/3ftOhXI
• The Future of Humanity (Michio Kaku): https://amzn.to/3Gz8ffA
• https://www.scientificamerican.com/article/what-is-the-memory-capacity/
• https://www.anl.gov/article/researchers-image-an-entire-mous…first-time.
• https://interestingengineering.com/cheating-death-and-becomi…-uploading.
Official Discord Server: https://discord.gg/R8cYEWpCzK
💡 On this channel, I explain the following concepts:
• Future and emerging technologies.
• Future and emerging trends related to technology.
• The connection between Science Fiction concepts and reality.
SUBSCRIBE: https://bit.ly/3geLDGO
Meet AV1, the mini robot that goes to the zoo or school for sick children who can’t.
Subscribe: http://smarturl.it/reuterssubscribe.
Reuters brings you the latest business, finance and breaking news video from around the globe. Our reputation for accuracy and impartiality is unparalleled.
Get the latest news on: http://reuters.com/
Follow Reuters on Facebook: https://www.facebook.com/Reuters.
Follow Reuters on Twitter: https://twitter.com/Reuters.
Follow Reuters on Instagram: https://www.instagram.com/reuters/?hl=en.
#RobotsAtWork

The animal looked and barked like a dog—albeit one with long, pointed, foxlike ears—but it also climbed bushes, a behavior more typical of the local Pampas fox, and it refused common dog food, preferring to eat rats.
Caretakers began to wonder if it might be a hybrid—a mixture of domestic dog and some local wild canid. They contacted geneticists Thales Renato Ochotorena de Freitas from the Universidade Federal do Rio Grande do Sul and Rafael Kretschmer from the Universidade Federal de Pelotas who, last month, published a study confirming the animal was the world’s first documented fox-dog. The finding excited and intrigued experts in animal genetics.
“What a strange hybrid beast!” wrote Roland Kays, a biologist with North Carolina State University and the North Carolina Museum of Natural Sciences, on X (formerly Twitter), alongside a photo of the creature and link to the study.

In cybersecurity, “threat data feeds” and “threat intelligence” are often used interchangeably. They are, however, quite different. To make matters worse, the term “threat intelligence” has been co-opted and watered down by vendors, making it even more difficult to define the difference between threat data feeds and threat intelligence.
An easy, and accessible, way to tell the difference is to think about weather forecasts. National TV news shows present a forecast for the entire country. You might get some useful information from this, but usually you just get an idea of what the weather is like nationwide. Local weather, however, drills down into the expected conditions for your specific area — not only temperature and weather, but also wind speed, barometric pressure, times for weather changes, and so on. You can use this information to plan out your actions for the next few days.
Using the weather forecast analogy, threat data feeds provide a high-level view of the security landscape. For example, it is useful to know that there is a vulnerability in a specific type of software, but it can be relatively trivial if that software is not in use at your organization. Likewise, knowing which threat groups are active is useful information, but how do you know if they are targeting your sector or organization and what processes and tools they are using?


WASHINGTON, Sept 27 (Reuters) — The founder of Branch Metrics, which developed a method of searching within smartphone apps, told a U.S. antitrust trial on Wednesday how his company struggled to integrate with devices because of steps Google took to block them.
The testimony came during the third week of a more than two-month trial in which the U.S. Justice Department is seeking to show that Alphabet’s Google (GOOGL.O) abused its monopoly of search and some search advertising. Google has said that its business practices were legal.
Google is accused of paying $10 billion a year based on “revenue share agreements” to smartphone makers, wireless carriers and others who agree to make its software the default and maintain its monopoly in search.
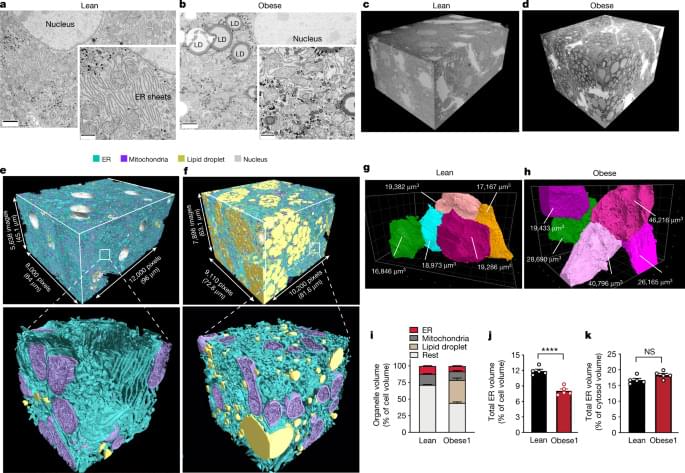
Fascinating 3D electron microscopy study by Parlakgül et al. wherein they compare the subcellular organization of liver tissue from lean and obese mice. The authors found substantial differences in endoplasmic reticulum (ER) organization. These ER differences were shown to directly influence metabolic health in a causal fashion, opening the doors to new ways of treating metabolic dysfunction. #electronmicroscopy #cellbiology #metabolism
Detailed reconstruction using enhanced focused ion beam scanning electron microscopy imaging and deep-learning-based automated segmentation demonstrates that hepatocyte subcellular organelle architecture regulates metabolism.
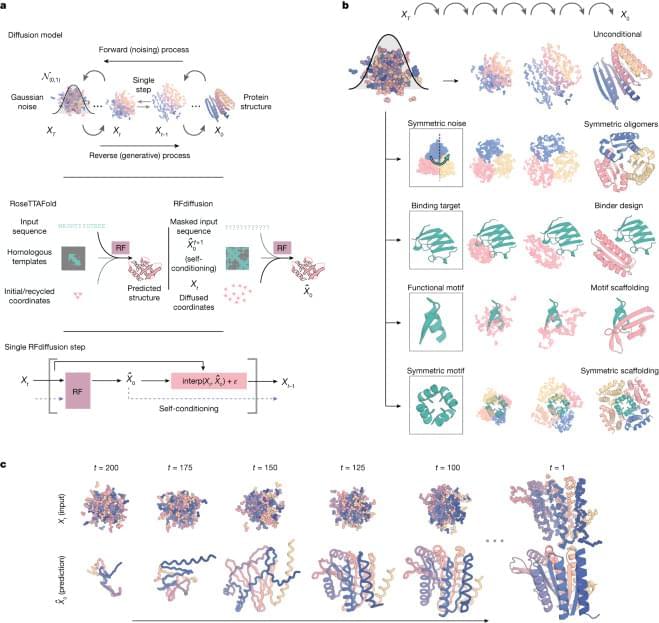
An extremely important landmark paper by Watson et al. from David Baker’s group. They developed RFdiffusion, a generative AI for protein engineering. With this tool, scientists can generate new protein designs. The software can generate novel monomers, multimers, and symmetric protein cages. It can generate proteins that bind to desired targets as well as enzymes that position active sites at a desired location on the structure. I would say that this technology has the potential to dramatically alter how biology and biotechnology is done. I’ve been waiting for something like this since middle school! So exciting to see protein engineering reaching this point!! #computationalbiology #proteinengineering #syntheticbiology #biotechnology #biochemistry #ai #generativeai
Fine-tuning the RoseTTAFold structure prediction network on protein structure denoising tasks yields a generative model for protein design that achieves outstanding performance on a wide range of protein structure and function design challenges.