Unity will add a native solution for bringing games to Valve’s Steam platform and introduce targeted enhancements to the engine’s Linux runtime.
Get the latest international news and world events from around the world.

‘Right to Compute’ bill passes House, while proposed data center precautions flop
The New Hampshire House continued to embrace a hands-off attitude toward technology regulation during two jam-packed session days on Wednesday and Thursday.
Representatives passed a bill proposing a broad “right to compute,” while killing other safeguard proposals aimed at data centers and artificial intelligence.
House Bill 1124, sponsored by New Boston Republican Keith Ammon, proposes enshrining the right of New Hampshire residents to “make use of computational tools” for any purpose, with carve-outs for cases where the government deems such use dangerous to the public.
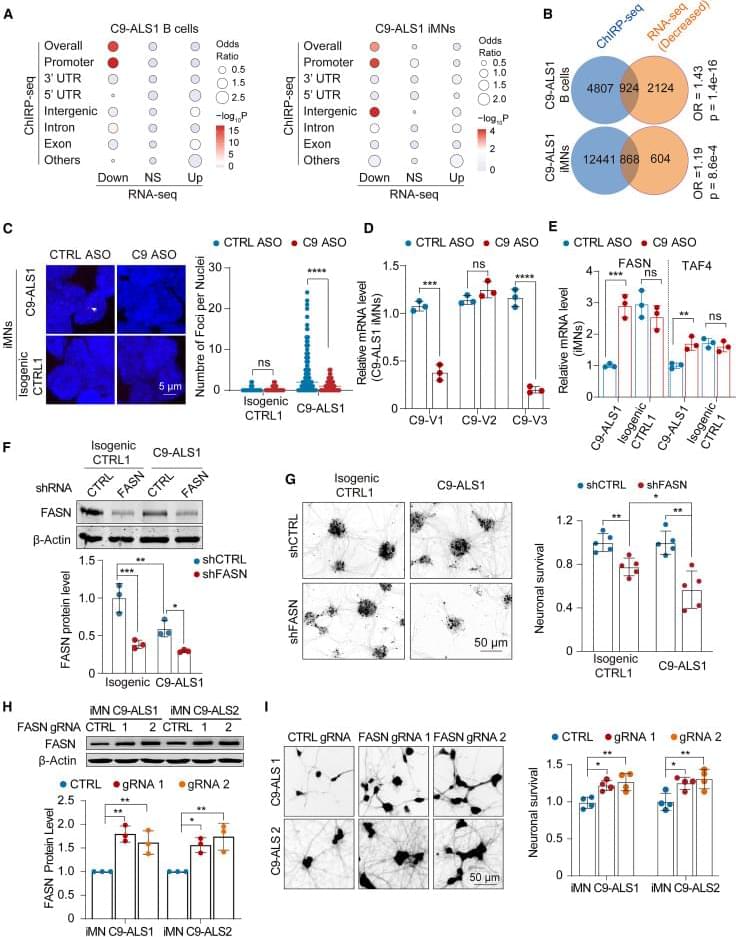
C9orf72 hexanucleotide repeat RNA drives transcriptional dysregulation through genome-wide DNA: RNA hybrid G-quadruplexes
{kind=link}
Transcriptional dysregulation hexanucleotide repeats in ALS
Repeat hexanucleotide RNAs in C9orf72 are implicated in amyotrophic lateral sclerosis (ALS) and frontotemporal dementia disease pathogenesis but the mechanisms of action remain incompletely understood.
The researchers demonstrate that expanded C9orf72 G4C2 repeat RNAs bind gene promoters across the genome and form DNA: RNA hybrid G-quadruplexes (HQs) structures with DNA.
These structures obstruct RNA polymerase II and transcription factors, repress gene expression, and heighten neuronal vulnerability, providing mechanistic insights into neurodegeneration in ALS and FTD. sciencenewshighlights ScienceMission https://sciencemission.com/hexanucleotide-repeat
Liu et al. demonstrate that expanded C9orf72 G4C2 repeat RNAs bind gene promoters across the genome and form HQ structures with DNA. These structures obstruct key transcription machinery, repress gene expression, and heighten neuronal vulnerability, providing mechanistic insights into neurodegeneration in ALS and FTD.
Mathematicians find one pi formula to rule them all
From the article:
“Each equation [for calculating π ] seemed unrelated to the others. But in late 2025, a team of seven AI researchers at the Technion–Israel Institute of Technology found a previously unknown mathematical structure underlying hundreds of pi formulas, including those of Archimedes, Euler and Ramanujan. “It’s not every day that you get to cite Archimedes,” says Ph.D. student Michael Shalyt, part of the team. The structure, called a conservative matrix field, or CMF, acts as a kind of mathematical common ancestor, showing how formulas that look nothing alike turn out to be different expressions of the same underlying object.”
A mixture of AI and algorithms uncovered a hidden structure spanning 2,000 years of equations for pi.
By Lyndie Chiou edited by Clara Moskowitz.
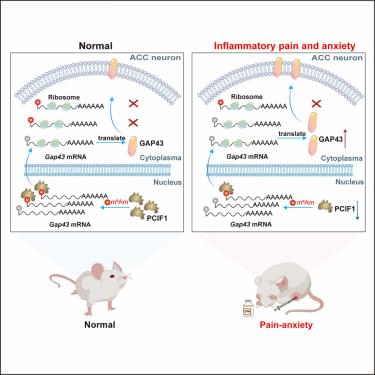
PCIF1-mediated m6Am modification in ACC neurons participates in inflammatory pain and anxiety
Liu et al. demonstrate that the m6Am methyltransferase PCIF1 in ACC neurons is crucial for both the initiation and maintenance of inflammatory pain and comorbid anxiety. They further reveal that PCIF1 modulates these behaviors by targeting Gap43 m6Am modification, thereby promoting GAP43 expression.
Interactive Zebrafish Embryo Single-Cell Atlas
A developmental atlas for genes and cells.
The interplay between genes and cells during the development of a fertilized egg into an embryo is highly complex. Previous methods captured gene activity only in 2D slices, making whole-embryo visualization impossible and offering limited spatial detail, often missing subcellular patterns.
The new method now enables the research team to visualize the activities of thousands of genes throughout the entire embryo and link them to cell maturation and movement. The result is a comprehensive atlas of early development, along with new insights into how genes and cells shape the growing embryo. The study was published in Science.
The team developed a new imaging technology called weMERFISH. It enables the direct measurement of the activity of nearly 500 genes in entire tissues with subcellular resolution.
From these measurements, the researchers created an atlas of early embryonic development. “By combining previous single-cell data with our gene activity measurements, we were able to calculate spatial patterns of thousands of genes and the activity of around 300,000 potential regulatory regions,” says the author. The data are freely accessible through the web platform MERFISHEYES (http://schier.merfisheyes.com). “The atlas is intended as a resource for developmental biologists around the world.”
With the help of the atlas, the researchers were also able to clarify how clear boundaries between different tissues form, for example between muscle and backbone tissue. They discovered a zone of cells in which the activity of many genes changes dramatically and differs from one side to the other.
A comparison of early and later stages showed that these genes are initially active on both sides but later only on one. And there are hardly any cells that cross this boundary. “These boundaries do not arise because cells are intermingled and then sort, but mainly because cells change their genetic program,” says the author.
A single-cell transcriptional reference for the functional and developmental diversity of neonatal innate lymphoid cells
{kind=link}
Mononuclear cells (MNCs) were isolated from fresh umbilical cord blood (CB) via a Ficoll gradient (n = 3). Unwanted cells were depleted using biotinylated antibodies (anti-CD3, anti-CD14, anti-CD19, and CD66b) and magnetic beads. The cells were stained to faithfully sort cILC1s (Lin−CD94−CD127+CD117−CRTH2−), cILC2s (Lin−CD94−CD127+CD117−/+ CRTH2+), cILC3s (Lin−CD94−CD127+CD117+CRTH2−), and NK cells (Lin−CD94+), as previously described.5,7,33 The four individual populations were individually multiplexed, pooled, and stained with Ab-Seq antibodies.
(A) scRNA-seq was performed via the BD Rhapsody protocol.
(B and C) UMAP visualization of sorted populations (B) and individual clusters of CB cILCs and NK cells with color coding of the individual cluster 0–10. The following clusters were identified: 0, CD56dim NK cells (GZMBhigh); 1, CD56dim NK cells (GZMBlow); 2, cILC2s (GATA3); 3, cILC progenitor (KIT); 4, CD56bright NK cells (GZMK); 5, intermediate zone (NK/cILCs); 6, cILC1s (CD5); 7, activated CD56dim NK cells (PCNA); 8, cycling CD56dim NK cells (MKI67); 9, cILC3s (RORC); and 10, CD56dim NK cells (FOXP2) ©.
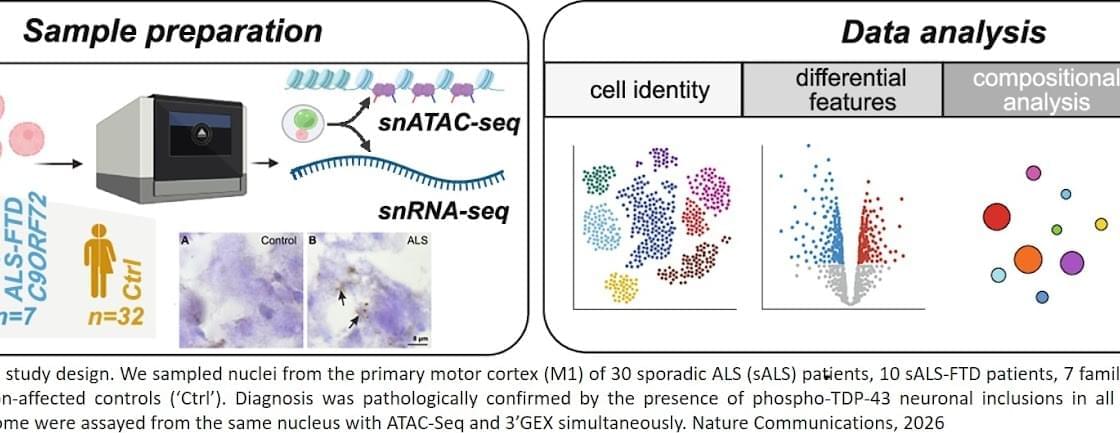
Cell-type specific TDP-43 pathology in the motor cortex
The hallmarks of cancer comprise six biological capabilities acquired during the multistep development of human tumors. The hallmarks constitute an organizing principle for rationalizing the complexities of neoplastic disease. They include sustaining proliferative signaling, evading growth suppressors, resisting cell death, enabling replicative immortality, inducing angiogenesis, and activating invasion and metastasis. Underlying these hallmarks are genome instability, which generates the genetic diversity that expedites their acquisition, and inflammation, which fosters multiple hallmark functions.
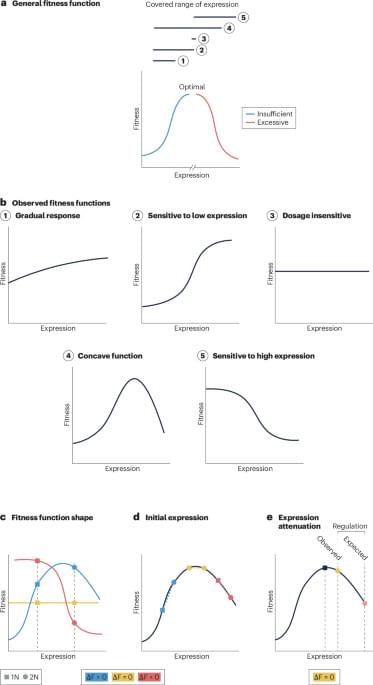
Evolutionary causes and consequences of gene duplication
Gene duplication is a key evolutionary mechanism, as initially redundant paralogues diverge over time. The authors review how adaptive and non-adaptive forces influence the evolutionary fates of gene duplicates, highlighting the importance of function–fitness relationships and gene expression dynamics.
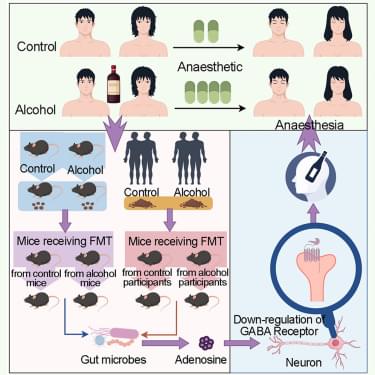
Adenosine signaling driven by the gut microbiota underlies chronic alcohol-induced anesthetic resistance
Wang et al. demonstrate that long-term alcohol consumption diminishes anesthetic sensitivity via a gut-microbiome-brain pathway. Their findings indicate that alcohol-induced dysbiosis elevates the metabolite adenosine, which subsequently downregulates brain GABAA receptors, thereby compromising anesthetic effectiveness.