The plaintiffs allege that the tech giants used people’s pictures obtained without permission to train their technologies.

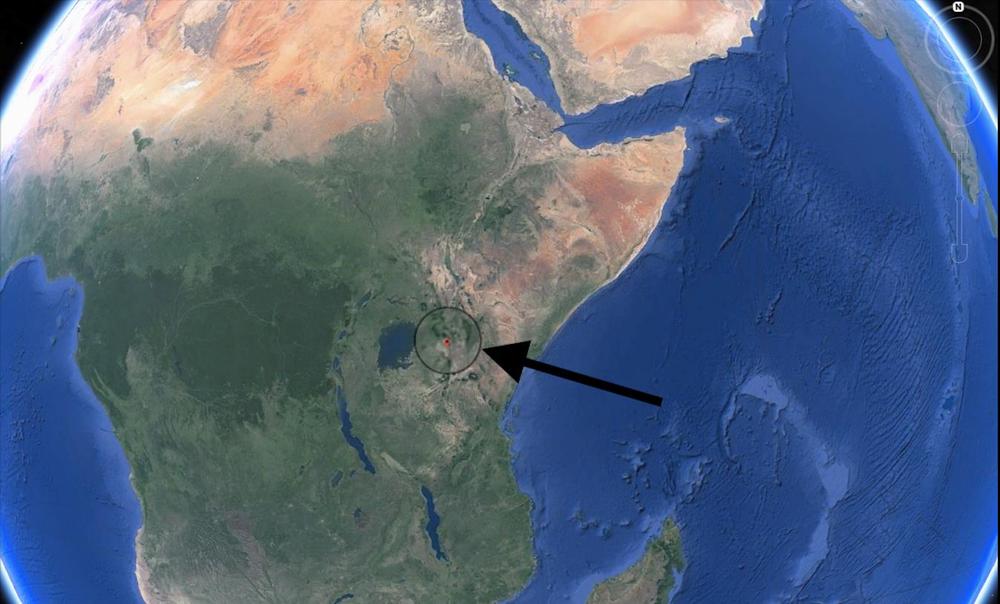
(MENAFN — The Conversation) A large crack, stretching several kilometres, made a sudden appearance recently in south-western Kenya. The tear, which continues to grow, caused part of the Nairobi-Narok highway to collapse. Initially, the appearance of the crack was linked to tectonic activity along the East African Rift. But although geologists now think that this feature is most likely an erosional gully, questions remain as to why it has formed in the location that it did and whether its appearance is at all connected to the ongoing East African Rift. For example, the crack could be the result of the erosion of soft soils infilling an old rift-related fault.
The Earth is an ever-changing planet, even though in some respects change might be almost unnoticeable to us. Plate tectonics is a good example of this. But every now and again something dramatic happens and leads to renewed questions about the African continent splitting in two.
The Earth’s lithosphere (formed by the crust and the upper part of the mantle) is broken up into a number of tectonic plates. These plates are not static, but move relative to each other at varying speeds, ‘gliding’ over a viscous asthenosphere. Exactly what mechanism or mechanisms are behind their movement is still debated, but are likely to include convection currents within the asthenosphere and the forces generated at the boundaries between plates.

Google’s Arts and Culture vertical has been known to release fun apps and tools to help people engage with art and history. In 2018, it launched a feature to let you find your fine art doppelganger by taking a selfie, and more recently it added ways for you to apply filters to your photos to take on the style of masters like Van Gogh or Da Vinci. Now, the company is launching a web-based AI tool to let users interact with ancient Egyptian hieroglyphs and also help researchers decode the symbols with machine learning. It’s called Fabricius, named after the “father of epigraphy, the study of ancient inscriptions,” according to Google, and will let you send roughly translated messages in hieroglyphs to your friends.
Fabricius has three sections: Learn, Play and Work. In the first part, you go through a quick six-stage course that introduces you to the history and study of hieroglyphs. There are activities here that include tracing and drawing a symbol, with machine learning analyzing your drawings to see how accurate you were. For example, my drawing of an Ankh symbol after having seen it for five seconds was determined to be 100 percent correct, while my attempt at a sceptre was deemed 98 percent accurate.
The high energy consumption of artificial neural networks’ learning activities is one of the biggest hurdles for the broad use of Artificial Intelligence (AI), especially in mobile applications. One approach to solving this problem can be gleaned from knowledge about the human brain.
Although it has the computing power of a supercomputer, it only needs 20 watts, which is only a millionth of the energy of a supercomputer.
One of the reasons for this is the efficient transfer of information between neurons in the brain. Neurons send short electrical impulses (spikes) to other neurons—but, to save energy, only as often as absolutely necessary.

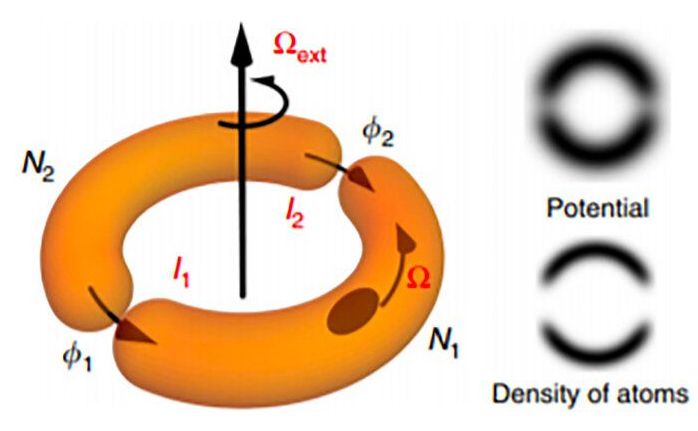
A new device that relies on flowing clouds of ultracold atoms promises potential tests of the intersection between the weirdness of the quantum world and the familiarity of the macroscopic world we experience every day. The atomtronic Superconducting QUantum Interference Device (SQUID) is also potentially useful for ultrasensitive rotation measurements and as a component in quantum computers.
“In a conventional SQUID, the quantum interference in electron currents can be used to make one of the most sensitive magnetic field detectors,” said Changhyun Ryu, a physicist with the Material Physics and Applications Quantum group at Los Alamos National Laboratory. “We use neutral atoms rather than charged electrons. Instead of responding to magnetic fields, the atomtronic version of a SQUID is sensitive to mechanical rotation.”
Although small, at only about 10 millionths of a meter across, the atomtronic SQUID is thousands of times larger than the molecules and atoms that are typically governed by the laws of quantum mechanics. The relatively large scale of the device lets it test theories of macroscopic realism, which could help explain how the world we are familiar with is compatible with the quantum weirdness that rules the universe on very small scales. On a more pragmatic level, atomtronic SQUIDs could offer highly sensitive rotation sensors or perform calculations as part of quantum computers.

A team led by Prof. Du Jiangfeng, Prof. Shi Fazhan, and Prof. Wang Ya from University of Science and Technology of China, of the Chinese Academy of Sciences, proposed a robust electrometric method utilizing a continuous dynamic decoupling technique, where the continuous driving fields provide a magnetic-field-resistant dressed frame. The study was published in Physical Review Letters on June 19.
Characterization of electrical properties and comprehension of the dynamics in nanoscale become significant in the development of modern electronic devices, such as semi-conductor transistors and quantum chips, especially when the feature size has shrunk to several nanometers.
The nitrogen-vacancy (NV) center in diamond—an atomic-scale spin sensor—has shown to be an attractive electrometer. Electrometry using the NV center would improve various sensing and imaging applications. However, its natural susceptibility to the magnetic field hinders effective detection of the electric field.
Could be used for quasar propulsion: 3.
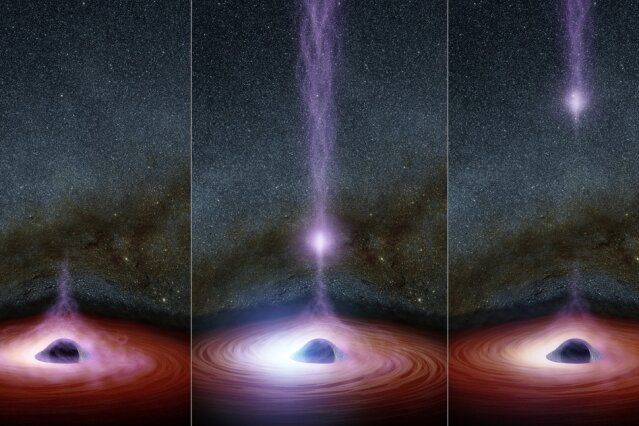
It seems the universe has an odd sense of humor. While a crown-encrusted virus has run roughshod over the world, another entirely different corona about 100 million light years from Earth has mysteriously disappeared.
For the first time, astronomers at MIT and elsewhere have watched as a supermassive black hole’s own corona, the ultrabright, billion-degree ring of high-energy particles that encircles a black hole’s event horizon, was abruptly destroyed.
The cause of this dramatic transformation is unclear, though the researchers guess that the source of the calamity may have been a star caught in the black hole’s gravitational pull. Like a pebble tossed into a gearbox, the star may have ricocheted through the black hole’s disk of swirling material, causing everything in the vicinity, including the corona’s high-energy particles, to suddenly plummet into the black hole.
At long last, the JEDEC Solid State Technology Association has officially finalized the specification for DDR5 SDRAM, which will serve as a blueprint for memory makers and future CPU platform designs as the industry shifts away from DDR4. However, it won’t happen overnight. More on that in a moment.
JEDEC is the industry group that develops and sets open memory standards, and it has more than 300 members, including AMD, Intel, Micron, Samsung, and a host of other major players in the semiconductor industry. JEDEC’s job is important because without the recognized standards that emerge, we would potentially have to navigate through a proprietary minefield when building a PC.

🤔 The WHO Chief is urging African nations to take part in clinical trials for a vaccine, yet is sending a team to China 7 months after the fact, and after China destroyed samples. The same WHO also is complaining about countries handling of the outbreak.
The UN body announced that over 1.4 million infections of COVID-19 are accounted for by health care sector workers, at least 10% of all cases. EU leaders have met to discuss a recovery package. Follow DW for the latest.