An algorithm can monitor the health of retired vehicle batteries used to store surplus power fed into the electrical grid.



The number of electric vehicles (EVs) exported from Germany rose sharply in 2023, meaning that EVs accounted for about one quarter of all car exports that year, the country’s statistical office Destatis has said.
The country exported about 786,000 fully electric cars for a total value of roughly €36 billion ($A61.8 billion) – an increase of 58 per cent compared to 2022.
The most important destinations for EVs produced in Germany were the Netherlands, the UK and Belgium, Destatis added. Imports of EVs to Germany climbed about 23 percent to 446,000 units, with more than a quarter coming from China.

Brighter with Herbert.

Driving at night might be a scary challenge for a new driver, but with hours of practice it soon becomes second nature. For self-driving cars, however, practice may not be enough because the lidar sensors that often act as these vehicles’ “eyes” have difficulty detecting dark-colored objects. Research published in ACS Applied Materials & Interfaces describes a highly reflective black paint that could help these cars see dark objects and make autonomous driving safer.
Lidar, short for light detection and ranging, is a system used in a variety of applications, including geologic mapping and self-driving vehicles. The system works like echolocation, but instead of emitting sound waves, lidar emits tiny pulses of near-infrared light. The light pulses bounce off objects and back to the sensor, allowing the system to map the 3D environment it’s in. But lidar falls short when objects absorb more of that near-infrared light than they reflect, which can occur on black-painted surfaces. Lidar can’t detect these dark objects on its own, so one common solution is to have the system rely on other sensors or software to fill in the information gaps. However, this solution could still lead to accidents in some situations. Rather than reinventing the lidar sensors, though, Chang-Min Yoon and colleagues wanted to make dark objects easier to detect with existing technology by developing a specially formulated, highly reflective black paint.
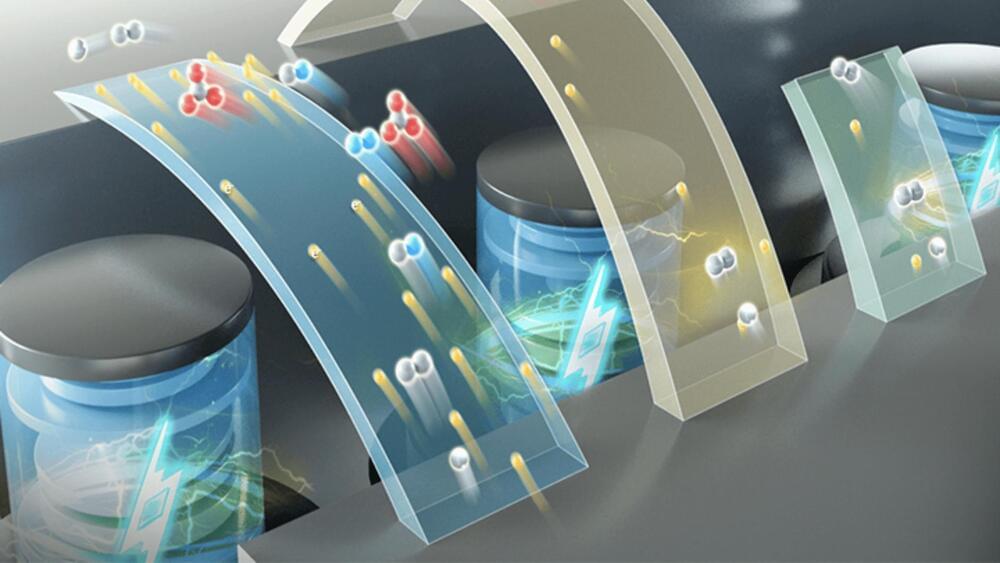
Researchers in China have developed a water-based battery, which is claimed to be much safer and energy-efficient than “highly flammable” non-aqueous lithium batteries.
Interestingly, the researchers say that these new batteries will be twice as energy-dense as traditional lithium-ion options. This holds the potential to revolutionize the electric vehicle industry.
Moreover, aqueous batteries use water as the solvent for electrolytes, enhancing their safety. Traditional non-aqueous lithium-ion batteries have a high energy density, but their safety is compromised due to the flammable organic electrolytes, a component that allows the battery to charge and discharge, they utilize.

Center for natural and artificial intelligence.
Tesla’s heavy investment in AI and autonomy, potential for full self-driving capability, and innovative business model have the potential to revolutionize multiple industries and generate massive revenue through software subscriptions and other ventures.
Questions to inspire discussion.
What is Tesla’s focus on AI and autonomy?
—Tesla is heavily investing in AI and autonomy, with plans for a fleet of autonomous vehicles and humanoid robots generating massive revenue through software subscriptions.