Recent technological advances have enabled the creation of increasingly sophisticated sensors that can track movements and changes in real-world environments with remarkable levels of precision. Many engineers are now working to make these sensors thinner so that they can be embedded in a variety of devices, including robotic limbs and wearable devices.
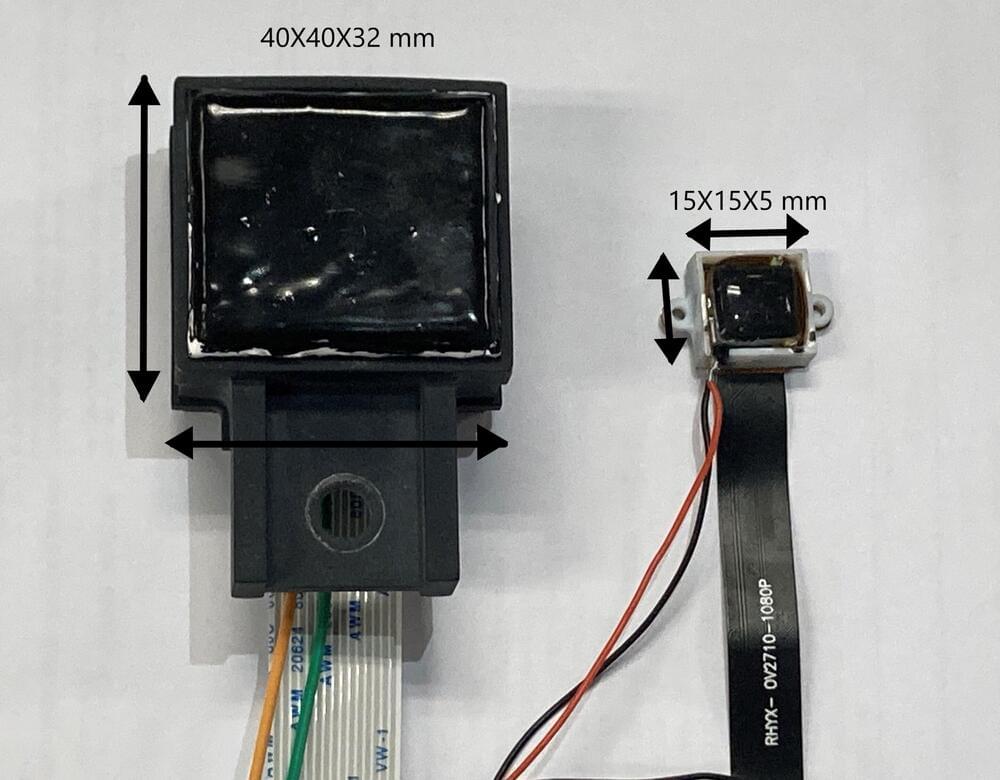
Researchers at Hong Kong University of Science and Technology have recently developed a thin sensor for computer vision applications, which is based on a micro lens array (MLA). MLAs are 1D or 2D arrays comprising several small lenses, which are generally arranged in either squared or hexagonal patterns.
“In this study, we combined an old technology, a micro lens array, with vision-based tactile sensors,” Xia Chen, one of the researchers who carried out the study, told TechXplore. “This work builds on the work using the pinhole arrays to capture the image. We wanted to achieve a thin-format vision-based tactile sensor, as few studies so far focused on changing the imaging system of vison-based tactile sensor.”