Disney Research Studios’ newest neural network, FRAN, can shave hours off of VFX artists’ workloads to create convincingly re-aged actors.
Category: robotics/AI – Page 1,569


Mastering Stratego, the classic game of imperfect information
Game-playing artificial intelligence (AI) systems have advanced to a new frontier. Stratego, the classic board game that’s more complex than chess and Go, and craftier than poker, has now been mastered. Published in Science, we present DeepNash, an AI agent that learned the game from scratch to a human expert level by playing against itself.
DeepNash uses a novel approach, based on game theory and model-free deep reinforcement learning. Its play style converges to a Nash equilibrium, which means its play is very hard for an opponent to exploit. So hard, in fact, that DeepNash has reached an all-time top-three ranking among human experts on the world’s biggest online Stratego platform, Gravon.
Board games have historically been a measure of progress in the field of AI, allowing us to study how humans and machines develop and execute strategies in a controlled environment. Unlike chess and Go, Stratego is a game of imperfect information: players cannot directly observe the identities of their opponent’s pieces.
This Artificial Intelligence Paper Presents an Advanced Method for Differential Privacy in Image Recognition with Better Accuracy
Machine learning has increased considerably in several areas due to its performance in recent years. Thanks to modern computers’ computing capacity and graphics cards, deep learning has made it possible to achieve results that sometimes exceed those experts give. However, its use in sensitive areas such as medicine or finance causes confidentiality issues. A formal privacy guarantee called differential privacy (DP) prohibits adversaries with access to machine learning models from obtaining data on specific training points. The most common training approach for differential privacy in image recognition is differential private stochastic gradient descent (DPSGD). However, the deployment of differential privacy is limited by the performance deterioration caused by current DPSGD systems.
The existing methods for differentially private deep learning still need to operate better since that, in the stochastic gradient descent process, these techniques allow all model updates regardless of whether the corresponding objective function values get better. In some model updates, adding noise to the gradients might worsen the objective function values, especially when convergence is imminent. The resulting models get worse as a result of these effects. The optimization target degrades, and the privacy budget is wasted. To address this problem, a research team from Shanghai University in China suggests a simulated annealing-based differentially private stochastic gradient descent (SA-DPSGD) approach that accepts a candidate update with a probability that depends on the quality of the update and the number of iterations.
Concretely, the model update is accepted if it gives a better objective function value. Otherwise, the update is rejected with a certain probability. To prevent settling into a local optimum, the authors suggest using probabilistic rejections rather than deterministic ones and limiting the number of continuous rejections. Therefore, the simulated annealing algorithm is used to select model updates with probability during the stochastic gradient descent process.
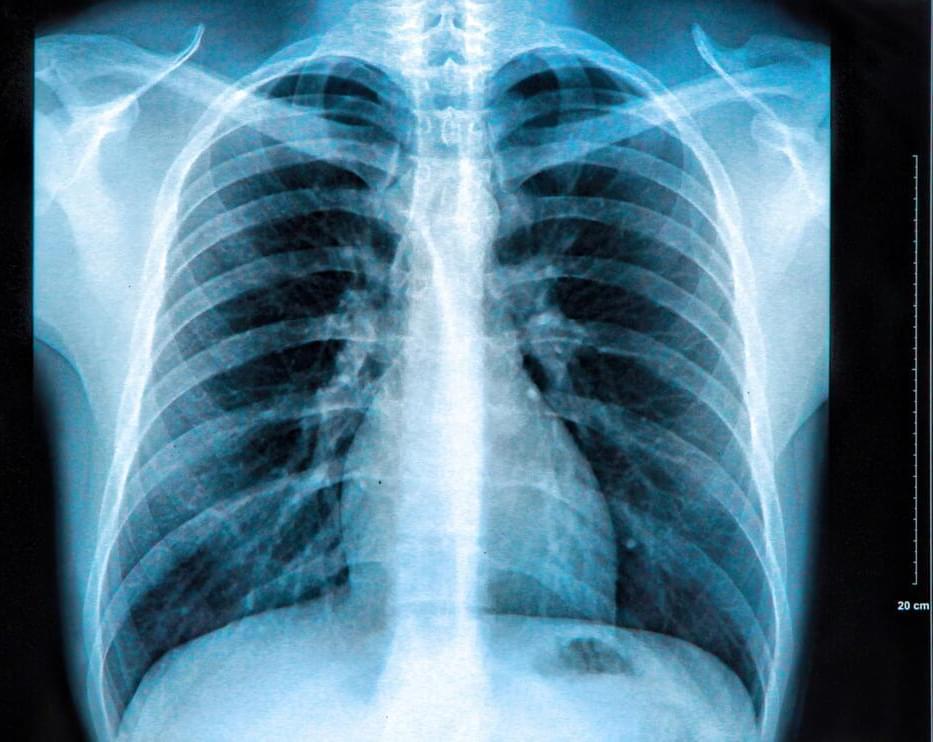
AI and one X-ray can potentially predict the risk of a heart attack or stroke
Researchers have created a deep learning method that can predict which patients might be eligible for life-saving medication that can prevent both diseases.
A new artificial intelligence model has been created that uses deep learning to predict the 10-year risk of death from a heart attack or stroke from a single X-ray. The results from the study were presented on Nov. 29 at the Radiological Society of North America (RSNA) annual meeting.
AI used to predict patterns of heart attacks and strokes
Deep learning uses artificial intelligence to ‘learn’ and view X-ray images to find patterns associated with various diseases, in this case, a stroke or heart attack.

In a first, robot removes a 2.3-inch cancerous tumor from a 61-year-old’s throat
Using the Versius surgical robot permitted a keyhole, or minimal access surgical approach, in an otherwise open surgery.
A robot at Gloucestershire Royal Hospital (GRH), United Kingdom, saved the life of a 61-year-old patient by removing a cancerous tumor from their throat, in what can be called a first in the country.
“To have been given a second chance to see my grandchildren, my children, and my wife has meant so much to me. The team at the GRH saved my life, and I’ll be forever grateful to them for doing so,” Nugent told Gloucestershire Live in an interview.
Versius/CMR Surgical.
Grandfather Martin Nugent is in high spirits after a surgical team comprising Gloucestershire Royal Hospital surgeons Simon Higgs and Steve Hornby employed Versius, a modern, cutting-edge robot from CMR Surgical, to operate earlier in July.