Safety avionics specialist Iris Automation has made a meteorological enhancement to its Casia G ground-based surveillance system with the integration of TruWeather Solutions sensors and services – a move aiming to add climate security to the company’s aerial detect-and-avoid protection.
Addition of a precision weather utility was a natural step in Iris Automation’s wider objective of ensuring flight safety of, and between, crewed aircraft and drones The company says local micro weather and low-altitude atmospheric conditions often differ considerably from those at higher levels. That differential creates a larger degree of weather uncertainty for aerial service providers, who weigh safety factors heavily into whether they make flights as planned or not.
Remote work is expanding into many other areas besides office work. Robots and remote-control technology make a greater range of tasks possible, from stocking convenience stores, to operating heavy machinery and even serving as a labor force in space. A key advantage of remote-controlled robots is that they do not require the kind of complex programming found in automated robots, such as industrial robots that work in factories. This means that remote-controlled robots are more flexible, easily adapting to work that cannot be programmed. Greater use of this technology can allow robots to take over dangerous and exhausting work, subsequently helping to deal with labor shortages and improve work environments. In this episode, we’ll look at the forefront of remote robotics, and see examples of how this technology could transform work.
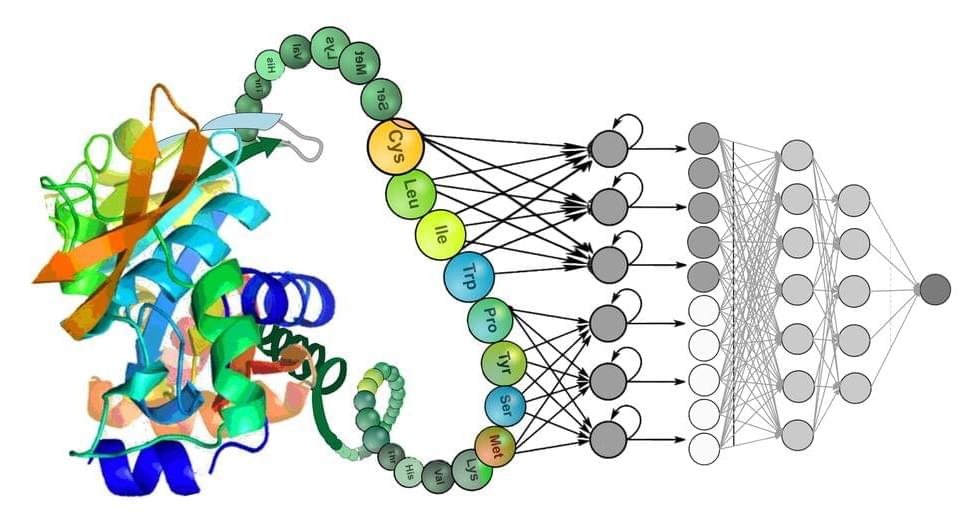
Deep learning–based language models, such as BERT, T5, XLNet and GPT, are promising for analyzing speech and texts. In recent years, however, they have also been applied in the fields of biomedicine and biotechnology to study genetic codes and proteins.
Elon Musk talks to Chris Anderson, head and curator of the TED media organisation, about the challenges facing humanity in the coming decades – and why we should be more optimistic.
They discuss climate change, clean energy, electric vehicles, the rise of AI and robotics, brain-computer interfaces, self-driving cars, the revolutionary potential of reusable rockets and the forthcoming missions to Mars, as well as the other projects he is working on.
Musk, who has an estimated net worth of $273 billion, provides insight into his work ethos and status as the world’s richest man. He also clarifies the accuracy and thought processes behind his future predictions.
Imagine a future in which you could 3D-print an entire robot or stretchy, electronic medical device with the press of a button—no tedious hours spent assembling parts by hand.
That possibility may be closer than ever thanks to a recent advancement in 3D-printing technology led by engineers at CU Boulder. In a new study, the team lays out a strategy for using currently-available printers to create materials that meld solid and liquid components—a tricky feat if you don’t want your robot to collapse.
“I think there’s a future where we could, for example, fabricate a complete system like a robot using this process,” said Robert MacCurdy, senior author of the study and assistant professor in the Paul M. Rady Department of Mechanical Engineering.
Remote robotic-assisted surgery is far from new, with various educational and research institutions developing machines doctors can control from other locations over the years. There hasn’t been a lot of movement on that front when it comes to endovascular treatments for stroke patients, which is why a team of MIT engineers has been developing a telerobotic system surgeons can use over the past few years. The team, which has published its paper in Science Robotics, has now presented a robotic arm that doctors can control remotely using a modified joystick to treat stroke patients.
That arm has a magnet attached to its wrist, and surgeons can adjust its orientation to guide a magnetic wire through the patient’s arteries and vessels in order to remove blood clots in their brain. Similar to in-person procedures, surgeons will have to rely on live imaging to get to the blood clot, except the machine will allow them to treat patients not physically in the room with them.
There’s a critical window of time after a stroke’s onset during which endovascular treatment should be administered to save a patient’s life or to preserve their brain function. Problem is, the procedure is quite complex and takes years to master. It involves guiding a thin wire through vessels and arteries without damaging any of them, after all. Neurosurgeons trained in the procedure are usually found in major hospitals, and patients in remote locations that have to be transported to these larger centers might miss that critical time window. With this machine, surgeons can be anywhere and still perform the procedure. Another upside? It minimizes the doctos’ exposure to radiation from X-ray imaging.