Researchers build nanophotonic chip that runs AI calculations with light, promising faster and more energy efficient computing.
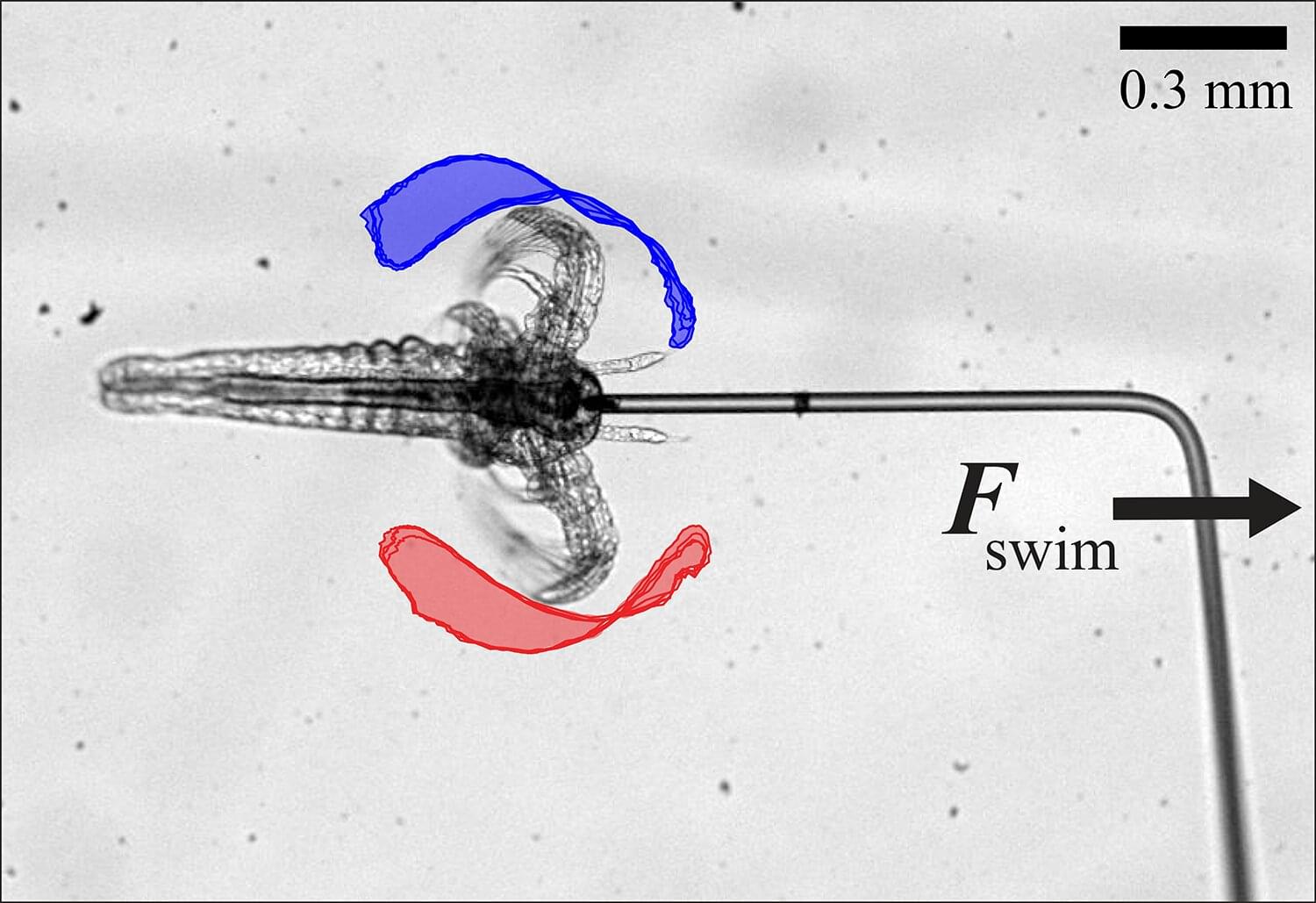
In physics, the mesoscale lies between the microscopic and the macroscopic. It is not just the domain of tiny living creatures like small larvae, shrimp, and jellyfish, but also where physics equations become extreme. While the macroscopic realm is governed by inertia and the microscopic by viscosity, the mesoscale is both and neither, requiring a new set of physics to describe it.
Now, physicists at Aalto University’s Department of Applied Physics have discovered how organisms swim in the mesoscale mix of viscosity and inertia. The study was recently published in the journal Communications Physics.
Led by Assistant Professor Matilda Backholm, the multidisciplinary team found the key to efficient swimming in this realm is not just moving faster or growing bigger, but a phenomenon of non-reciprocal motion known as time reversal symmetry breaking. The results help fill a knowledge gap in fundamental physics and could pave the way for applications such as mesorobotics; tiny robots injected inside a patient’s body for drug delivery or carrying out medical procedures.
AI has designed candidate drugs for antibiotic-resistant infections and genetic diseases. But efforts to incorporate AI into the design of lipid nanoparticles (LNPs), the revolutionary delivery vehicles behind mRNA therapies like the COVID-19 vaccines, have been much more limited.
Designing LNPs is especially challenging: Each formulation combines multiple lipid components whose ratios influence how the particle delivers genetic instructions inside cells. Scientists still lack a clear map connecting those chemical inputs to biological outcomes.
The reason? There simply isn’t enough data.
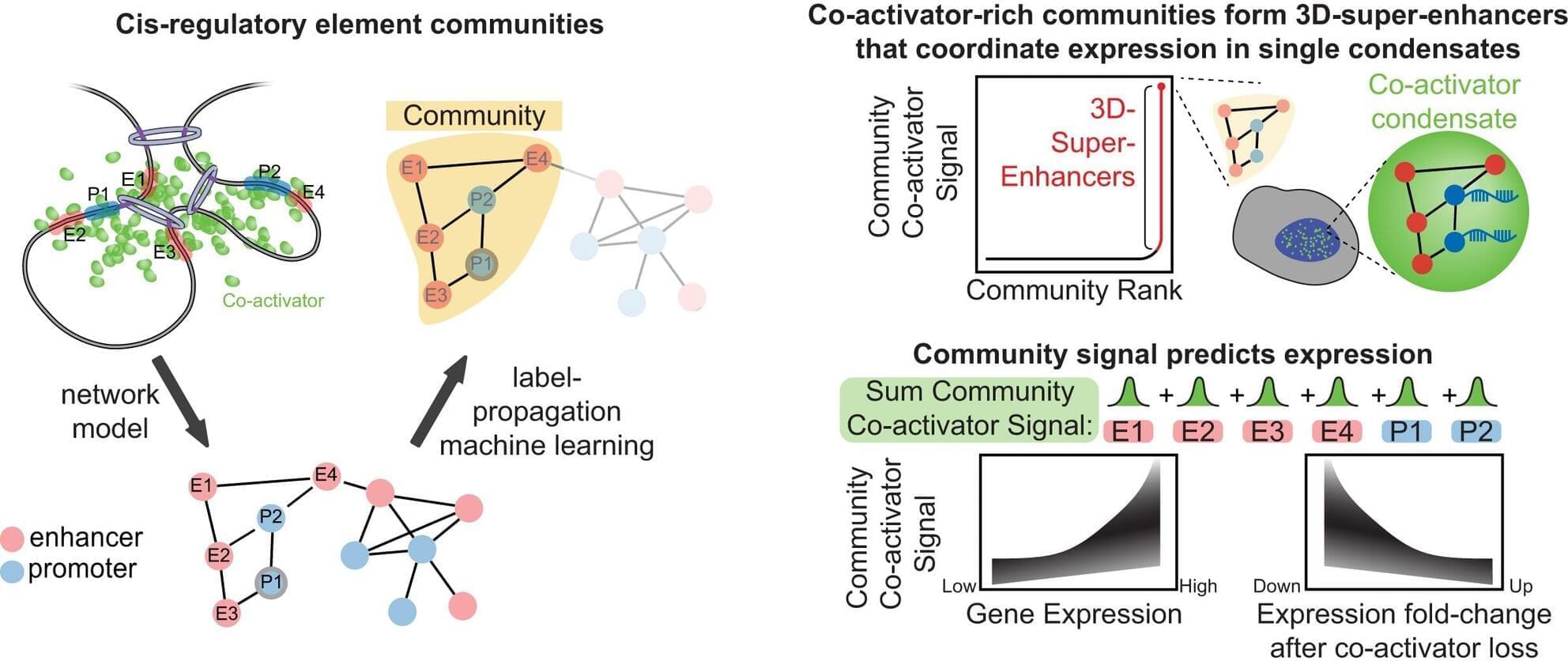
Scientists usually study the molecular machinery that controls gene expression from the perspective of a linear, two-dimensional genome—even though DNA and its bound proteins function in three dimensions (3D). To better understand how key components of this machinery, such as super-enhancers, regulate genes in this 3D reality, scientists at St. Jude Children’s Research Hospital have developed a new algorithm called BOUQUET.
Using machine learning, BOUQUET reveals that sets of genes and their regulatory elements can interact within protein condensates, high-density membraneless droplets, in cells’ nuclei. The findings, which provide new insight into how cells regulate the genes that control their specialized identities, were published today in Nucleic Acids Research.
Cells express certain sets of genes to carry out specific functions; for example, a blood cell and a brain cell express different context-specific genes. There are 3 billion base pairs of human DNA, and the genes involved in cell identity are scattered throughout. Even more challenging, enhancers, DNA elements that activate gene expression, can be thousands of DNA bases away from their target genes.


Cybersecurity researchers have discovered a malicious npm package that masquerades as an OpenClaw installer to deploy a remote access trojan (RAT) and steal sensitive data from compromised hosts.
The package, named “@openclaw-ai/openclawai,” was uploaded to the registry by a user named “openclaw-ai” on March 3, 2026. It has been downloaded 178 times to date. The library is still available for download as of writing.
JFrog, which discovered the package, said it’s designed to steal system credentials, browser data, crypto wallets, SSH keys, Apple Keychain databases, and iMessage history, as well as install a persistent RAT with remote access capabilities, SOCKS5 proxy, and live browser session cloning.
Interestingly, the original extension developer has published several other extensions under their name on the Chrome Web Store, and all of them have received a Featured badge. The developer also has an account on ExtensionHub, although no extensions are currently listed for sale. What’s more, the individual has attempted to sell domains like “AIInfraStack[.]com” for $2,500, stating the “strong keyword domain” is “relevant for [sic] rapidly growing AI ecosystem.”
“This is the extension supply chain problem in a nutshell,” Annex Security said. “A ‘Featured,’ reviewed, functional extension changes hands, and the new owner pushes a weaponized update to every existing user.”
The disclosure comes as Microsoft warned of the malicious Chromium‑based browser extensions that masquerade as legitimate AI assistant tools to harvest LLM chat histories and browsing data.

Microsoft says threat actors are increasingly using artificial intelligence in their operations to accelerate attacks, scale malicious activity, and lower technical barriers across all aspects of a cyberattack.
According to a new Microsoft Threat Intelligence report, attackers are using generative AI tools for a wide range of tasks, including reconnaissance, phishing, infrastructure development, malware creation, and post-compromise activity.
In many cases, AI is used to draft phishing emails, translate content, summarize stolen data, debug malware, and assist with scripting or infrastructure configuration.

{kind=link}