In recent years, roboticists have been trying to improve how robots interact with different objects found in real-world settings. While some of their efforts yielded promising results, the manipulation skills of most existing robotic systems still lag behinds those of humans.
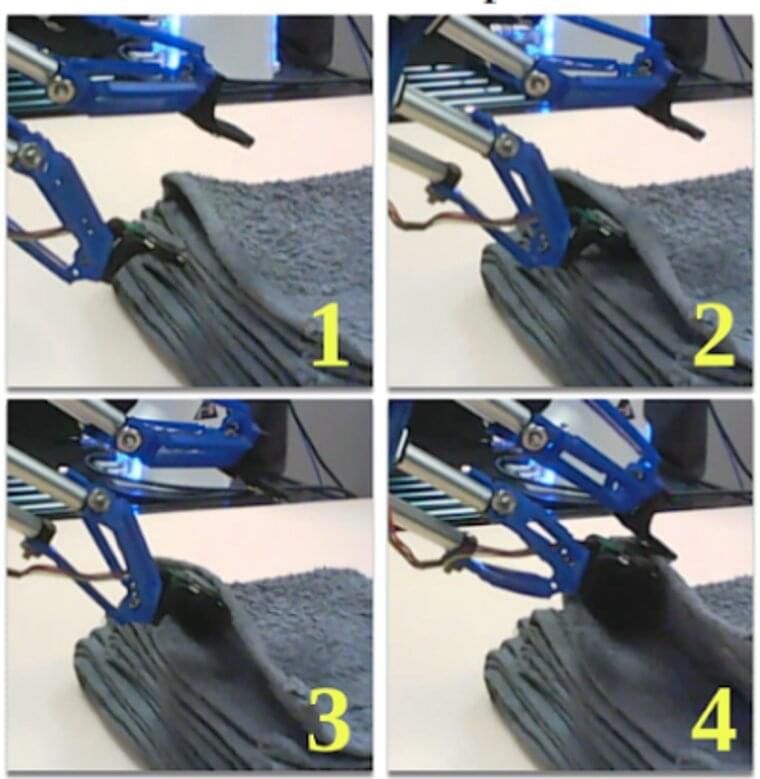
Fabrics are among the types of objects that have proved to be most challenging for robot to interact with. The main reasons for this are that pieces of cloth and other fabrics can be stretched, moved and folded in different ways, which can result in complex material dynamics and self-occlusions.
Researchers at Carnegie Mellon University’s Robotics Institute have recently proposed a new computational technique that could allow robots to better understand and handle fabrics. This technique, introduced in a paper set to be presented at the International Conference on Intelligent Robots and Systems and pre-published on arXiv, is based on the use of a tactile sensor and a simple machine-learning algorithm, known as a classifier.