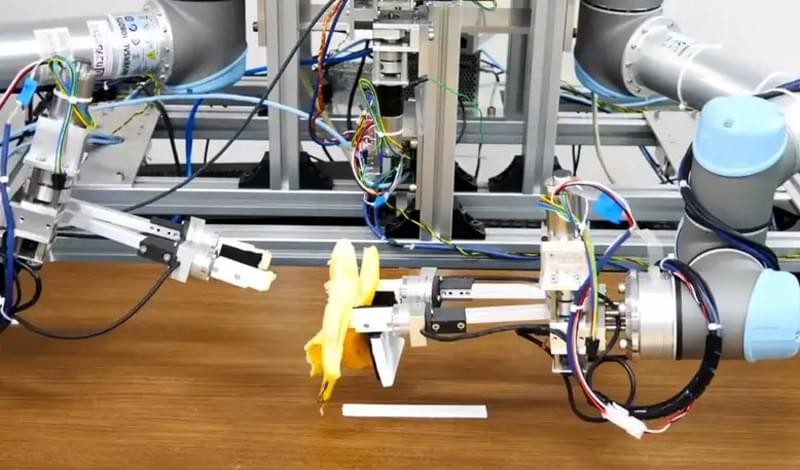
Researchers in Japan have developed a new machine learning system for a two-armed robot – enabling it to identify, pick up, and peel a banana.
Researchers at the University of Tokyo have developed a new machine learning system for a two-armed robot – enabling it to identify, pick up, and peel a banana.
The manipulation of deformable objects, like soft fruits, is problematic for robots, because of difficulties in object modelling and a lack of knowledge about the type of force and dexterity needed.
Heecheol Kim, a researcher in the Intelligent Systems and Informatics Laboratory, University of Tokyo, worked with colleagues to develop a system based on “goal-conditioned dual-action deep imitation learning (DIL)”. This can learn dexterous manipulation skills using human demonstration data.