The ability to estimate the physical properties of objects is of key importance for robots, as it allows them to interact more effectively with their surrounding environment. In recent years, many robotics researchers have been specifically trying to develop techniques that allow robots to estimate tactile properties of objects or surfaces, which could ultimately provide them with skills that resemble the human sense of touch.
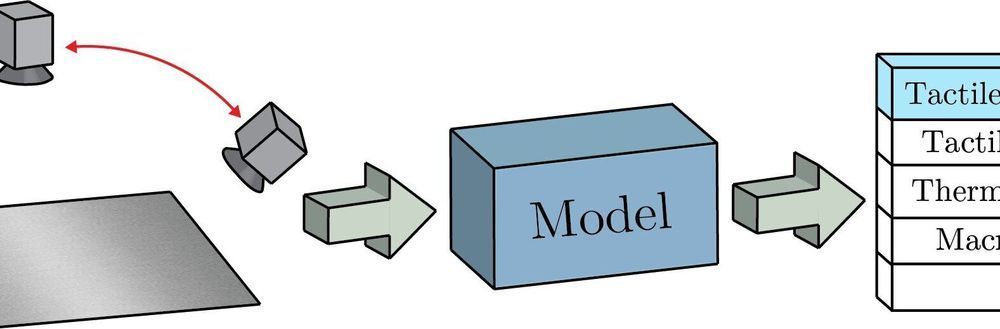
Building on previous research, Matthew Purri, a Ph.D. student specializing in Computer Vision and AI at Rutgers University, recently developed a convolutional neural network (CNN)-based model that can estimate tactile properties of surfaces by analyzing images of them. Purri’s new paper, pre-published on arXiv, was supervised by Kristin Dana, a professor of Electrical Engineering at Rutgers.
“My previous research dealt with fine-grain material segmentation from satellite images,” Purri told TechXplore. “Satellite image sequences provide a wealth of material information about a scene in the form of varied viewing and illumination angles and multispectral information. We learned how valuable multi-view information is for identifying material from our previous work and believed that this information could act as a cue for the problem of physical surface property estimation.”